
Bayesian statistics
•
통계에 대한 베이지안 접근에서 파라미터 를 미지수로 다루고, 데이터 가 알려지고 고정되었다고 한다. 데이터를 본 한 후에 (사후에) 베이즈 룰을 사용하여 posterior 분포를 계산함으로써 파리미터에 관한 불확실성을 표현한다.
◦
베이지안 접근은 데이터를 관찰하면서 현재 확률 분포를 지속적으로 업데이트하는 것이고, 빈도주의의 접근은 데이터를 관찰하면서 현실을 정확히 표현하는 어떤 이상적인 확률 분포를 찾는 것이고 할 수 있다.
•
여기서 는 prior라고 하며 데이터를 보기 전에 파라미터에 대한 믿음(belief)를 표현한다.
◦
는 likelihood라고 하며 각 파라미터의 설정에 대해 어떤 데이터가 나올 것이라고 예상하는지에 대한 믿음이다.
◦
는 posterior라고 하며 데이터를 본 후에 파라미터에 관한 믿음을 표현한다.
◦
는 marginal likelihood 또는 evidence라고 하고 정규화 상수이다.
•
이 posterior를 계산하는 작업을 Bayesian inference, posterior inference 또는 그냥 inference라고 한다.
Maximum Likelihood Estimation(MLE)
•
Likelihood를 최대화하는 파라미터 를 찾는 것이 Maximum Likelihood Estimation(MLE)이다. 이 결과는 Likelihood의 최빈값(Mode)가 된다.
Maximum A Posterior(MAP)
•
Posterior를 최대화하는 파라미터 를 찾는 것이 Maximum A Posterior(MAP)이다. 이 결과는 posterior의 최빈값(Mode)가 된다.
•
posterior가 prior와 likelihood의 곱으로 표현가능하기 때문에 MAP은 다음과 같이 표현할 수 있다.
•
일반적으로는 log를 취해 다음과 같이 표현한다.
Marginal Likelihood
•
marginal likelihood 는 연관된 prior와 함께 관찰된 데이터를 얼마나 잘 설명하느냐를 평가하는데 사용된다. 고로 베이지안 모델 선택에서 marginal likelihood가 가장 높은 모델을 선택하게 됨.
•
posterior를 로 표현하는 것과 유사하게, marginal likelihood에 대해 다음처럼 계산할 수 있다.
◦
위는 이산인 경우, 아래는 연속인 경우
•
marginal likelihood는 log가 식 안으로 들어갈 수 없기 때문에, log를 취해서 덧셈으로 변환할 수 없다.
•
만일 특정 파라미터 에 대해 marginal likelihood를 구한다면 다음과 같이 작성해서 계산할 수 있다.
◦
위는 이산인 경우, 아래는 연속인 경우.
•
흥미롭게도 log marginal likelihood는 모델 평가에 대한 leave-one-out cross validation(LOO-CV)의 log likelihood와 가깝게 연관되어있다.
Posterior mean, variance
•
mode는 전체 분포에서 단일 점을 고르는 것에 해당하므로 분포를 제대로 요약하지 못한다. 좀 더 견고한 값은 평균(mean)이다.
◦
prior와 likelihood가 켤레(conjugate)일 때, posterior의 mean은 prior의 mean과 likelihood의 mode(MLE)의 볼록 결합(convex combination)으로 표현 가능하다.
•
추정치의 불확실성을 포착하기 위해 표준 오차(standard error)를 계산할 수 있는데, 베이지안 통계에서 이것은 posterior의 표준 편차(standard deviation)으로 계산된다.
Credible intervals
•
posterior 분포는 고차원 객체이기 때문에 이것을 요약하는 일반적인 방법은 posterior의 평균이나 최빈값 같은 점 추정치를 구한 다음에 이 추정치에 연관된 불확실성을 정량화하는 credible interval(신뢰 구간)을 계산하는 것이다.
•
더 정확하게 % 신뢰 구간을 posterior 확률 질량의 을 포함하는 (인접한) 영역 (lower와 upper의 약자이다) 으로 정의한다.
•
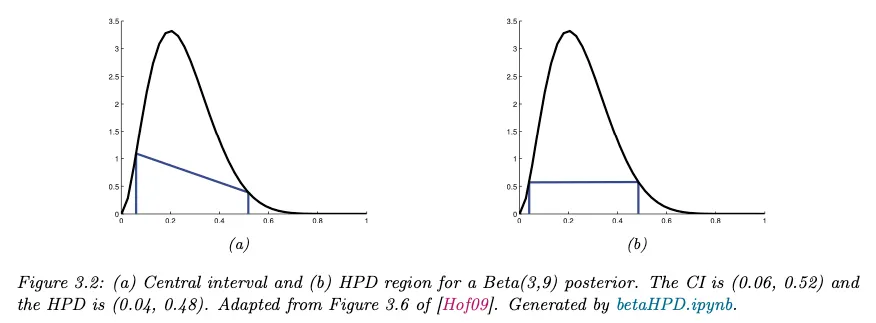
위 식을 만족하는 많은 구간이 있을 수 있기 때문에 일반적으로 각 꼬리에서 질량이 인 구간을 선택한다. 이것을 central interval(중심 구간)이라고 한다.
◦
posterior가 알려진 함수 형식을 가지면 와 를 사용하여 posterior central interval을 계산할 수 있다. 여기서 는 posterior의 cdf이고 은 inverse cdf이다.
◦
만일 posterior가 가우시안 이고 이면 이고 이 된다. 여기서 는 가우시안의 cdf 표기이다.
◦
이것은 형식의 신뢰 구간을 인용하는 일반적인 사용을 나타낸다. 여기서 는 posterior 평균을 나타내고 는 posterior 표준편차를 나타내고 는 에 대한 좋은 근사치이다.
•
중심 구간의 문제는 구간 내부보다 외부에 많은 점들이 있을 수 있다는 것이다. 이 때문에 어떤 임계치(threshold) 보다 높은 확률을 갖는 점들의 집합인 highest posterior density(HPD)를 사용한다. 더 정확하게 다음과 같은 pdf 위의 임계치 를 찾는다.
•
그 다음 HPD를 다음처럼 정의한다.
•
1차원의 경우 HPD 영역은 highest density interval(HDI)라고 부른다.
◦
아래 그림 (b)는 분포의 95% HDI 를 보여준다. 이것이 질량의 95%를 포함함에도 중심 구간보다 좁다는 것을 볼 수 있다. 게다가 내부의 모든 점이 외부의 모든 점보다 밀도가 높다.
Posterior predictive distribution
•
미래 관측을 예측하기 위해 알려지지 않은 파라미터들을 모두 marginalizing out해서 posterior predictive distribution을 계산할 수 있다.
•
이 적분은 계산하기 어렵기 때문에 파라미터의 점 추정치 를 plug in 하여 근사치를 구할 수 있다. 여기서 는 MLE나 MAP를 계산하는 방법과 같은 추정기이다.
•
이것을 plugin approximation이라고 한다. 이것은 점 추정치를 중심으로 한 degenerate 분포로 posterior를 모델링하는 것과 동등하다.
•
불행히 plugin 근사는 과적합될 수 있다. 플러그인 근사 대신 정확한 posterior 예측을 계산하기 위해 모든 파라미터 값을 marginalize 할 수 있다.
Marginal likelihood
•
모델 에 대한 marginal likelihood (evidence라고도 함)는 다음과 같이 정의된다.
•
특정한 모델의 파라미터에 대한 추론을 수행할 때, 이 항은 에 관해 상수이기 때문에 이 항을 무시할 수 있다.
◦
그러나 이 수량은 두 모델 사이를 선택할 때 필수적인 역할을 수행한다. 이것은 데이터로부터 하이퍼파라미터를 추정할 때도(empirical Bayes라고 부르는 접근) 유용하다.
•
일반적으로 marginal likelihood를 계산하는 것은 어렵다.
◦
그러나 베타-베르누이 모델의 경우에 marginal likelihood는 posterior normalizer와 prior normalizer의 비율에 비례한다.
Modeling more complex data
•
베이지안 접근을 더 복잡한 모델에도 적용할 수 있다. 예컨대 머신러닝에서 입력 feature 가 주어지면 출력 를 예측하는데 매우 관심이 있다. 이를 위해 형식의 조건부 확률 분포를 사용할 수 있다. 이것은 선형 모델나 신경망 등으로 일반화될 수 있다.
•
관심있는 주요 수량은 다음과 같이 주어지는 posterior 예측 분포이다.
•
알려지지 않은 파라미터를 적분하거나 marginalizing out하여 무한한 수의 모델로부터 예측의 가중 평균을 효과적으로 계산하기 때문에 과적합의 가능성을 줄인다.
◦
불확실성을 적분하는 행위는 머신러닝에 대한 베이지안 접근의 핵심이다.
•
베이지안 접근을 더 일반적인 플러그인 근사와 대비하는 것은 가치가 있다. 여기서는 파라미터의 점 추정 을 계산하고(MLE 같이) 그것을 을 사용하여 모델에 연결하여 예측을 만든다.
◦
플러그인 근사는 단순하고 널리 사용되지만 그러나 파라미터 추정에서 불확실성을 무시하므로 예측 불확실성이 과소추정(underestimate)될 수 있다.
Exchangeability and de Finetti’s theorem
•
베이지안 접근에 대한 흥미로운 철학적인 질문은 이것이다. ‘prior는 어디서 오는가?’ 이것은 모델의 추상적인 수량일 뿐이고, 직접 관찰할 수 없는 파라미터를 참조한다.
◦
de Finetti’s theorem이라 하는 근본적인 결과는 이러한 파라미터가 관찰 가능한 결과에 대한 믿음과 어떻게 연관되었는지를 설명한다.
•
결과를 설명하기 위해 우선 정의를 해야 한다.
◦
임의의 에 대해 결합 확률 의 index가 순열에 불변이면 확률 변수들의 시퀀스 를 infinitely exchangeable(교환 가능)이라고 한다. 즉 모든 순열 에 대해 다음이 성립한다.
•
교환가능은 iid(independent, identically distribute) 변수의 시퀀스라는 더 친숙한 개념에 비해 더 일반화된 개념이다.
◦
예컨대 가 이미지의 시퀀스라고 가정한다. 여기서 는 ‘실제 분포’ 에서 독립적으로 생성된다. 이것이 iid 시퀀스임을 알 수 있다.
◦
이제 가 background 이미지라고 가정하자. 시퀀스 은 무한히 교환가능하지만 iid는 아니다. 모든 변수들이 숨겨진 공통 요소 즉 background 를 공유하기 때문이다.
◦
따라서 더 많이 볼수록 공유된 를 더 잘 추정할 수 있으므로 미래 요소를 더 잘 예측할 수 있다.
•
더 일반적으로 교환 가능 시퀀스를 숨겨진 공통 원인에서 비롯한 것으로 볼 수 있고 이를 알려지지 않은 확률 변수 로 처리할 수 있다. 이것은 de Finetti’s theorem으로 형식화될 수 있다.
de Finetti’s theorem. 확률 변수들의 시퀀스 는 다음과 같이 모든 에 대해 무한히 교환 가능하고, 그 역도 성립한다.
여기서 는 어떤 숨겨진 공통 확률 변수(아마도 무한 차원)이다. 즉 는 에서 조건부 iid이다.
•
종종 를 파라미터로 해석한다. 이 정리에 따르면 데이터가 교환 가능하면 반드시 파라미터 , likelihood , prior 가 반드시 존재한다. 따라서 베이지안 접근은 교환 가능성으로부터 자동으로 따라온다.
◦
이 접근법은 partially exhangeable(부분적으로 교환 가능)이라는 개념을 사용하여 조건부 확률 모델을 확장할 수도 있다.
